viernes, 26 de noviembre de 2010
domingo, 21 de noviembre de 2010



martes, 3 de agosto de 2010
El Factor de Potencia (FP) en accionamientos de velocidad variable AC y DC
El Factor de Potencia (FP) de un motor estándar depende de su potencia nominal y, por lo general, es de alrededor de 0.85. Sin embargo, puede ser mucho menor si el motor lleva poca carga (Fig.# 1)

El término factor de potencia se confunde a menudo con cos φ (phi). El FP se define como el cociente entre la potencia real o activa (P), expresada en kilovatios (KW), respecto a la potencia aparente (S), expresada en kilovolt-amp (KVA)

Recuerde que cos φ es igual al factor de potencia sólo cuando ambas, la tensión del sistema (U) y la corriente del sistema (I) son sinusoidales y con la misma frecuencia. En el mundo real de las instalaciones eléctricas, tanto las tensiones como las corrientes contienen armónicos, por lo que el factor de potencia no será igual a cos φ

Fig. # 2 Circuito RLC

Fig. # 3 Diagrama Fasorial
Estas tensiones y corriente se pueden expresar en forma de fasores (Fig. 3). La corriente es común para cada componente en el sistema, pero las tensiones tienen magnitudes diferentes, y están defasadas 90 ° . Los tres esquemas de la fig. 3 muestran los pasos para la definición de los fasores de voltaje y el ángulo entre el voltaje y la corriente total. Esto nos da la definición del cos φ:

Los beneficios del variador de velocidad de corriente alterna ( Drive AC)
Para producir el par de rotación y velocidad requerida, un motor de inducción requiere de ambas corrientes (activa y reactiva) de la red eléctrica. El par de giro del motor se crea como una interacción entre el componente de la corriente activa y el campo magnético. El campo es producido por el componente de la corriente reactiva. Las cargas ligeras toman menos corriente activa, pero el campo magnético, así como la corriente reactiva, se mantienen constante. Esto significa que el factor de potencia disminuye con la disminución de la carga. La corriente es principalmente activa a plena carga, pero principalmente reactiva con carga ligera.
Mediante la instalación de los accionamientos de velocidad variable AC, se pueden mejorar los controles del proceso, aumentar el ahorro de energía, y reducir el desgaste de la maquinaria. Estas unidades también tienen el beneficio añadido de mejorar el FP.
El FP en la línea de AC de un accionamiento con modulación por ancho de pulso (PWM) con un puente rectificador de entrada es próximo a la unidad (Fig. 4). La sección de rectificación consiste de un puente rectificador de diodos fijo el cual convierte el voltaje de la fuente de alimentación trifásico en un voltaje DC.
La bobina de choque L1 y el capacitor C, suavizan el voltaje DC convertido
El valor rectificado DC (Ud) es aproximadamente 1.35 veces el voltaje entre líneas (650 VDC aproximadamente para una fuente de 480 VAC).
 Fig. # 4 Drive AC con tecnología PWM
Fig. # 4 Drive AC con tecnología PWM
En la sección de inversor el voltaje de DC (Ud) se convierte entonces en un voltaje AC de magnitud y frecuencia variables que se conecta al motor de corriente alterna. El inversor consiste de seis semiconductores muy rápidos, por lo general IGBT (insulated gate bipolar transistor) en unidades modernas. La unidad lógica de control (Control Logic) utiliza un microprocesador para switchear los IGBT encendiéndolos y apagándolos suministrando un voltaje y frecuencia variables al motorLa salida puede tener una FP inductivo (atrasado) debido a la reactancia inductiva del motor. Sin embargo, la corriente reactiva del motor circula entre el motor y el inversor, pero no en la línea de entrada.
Para comprender mejor el proceso por el cual los drives AC puede mejorar el FP, nos referimos al nivel de tensión y al sistema compuesto por el motor y el drive en la figura # 1.
Potencia mecánica del motor = 55 Kw (Potencia de salida del motor)
Voltaje de entrada = 400 V
Eficiencia = 94.4 %
FP = 0.89
La potencia eléctrica de entrada al motor sería = 55 Kw / 0.944 = 58.3 Kw
La potencia de salida del drive es igual a la potencia de entrada del motor, luego:
La potencia de salida del drive = 58.3 Kw
Voltaje de entrada del drive = 400 V
Eficiencia del drive = 98%
FP del drive = 0.96
La potencia de entrada del drive seria = 58.3 Kw / 0.98 = 59.5 Kw
La formula para determinar la potencia activa (real) en un sistema trifásico es:

Usando esta formula podemos calcular las corrientes de salida y entrada del drive.


La corriente de entrada al drive (alimentación) es aproximadamente un 5% menor que la corriente de salida hacia el motor.
La potencia activa de entrada al drive es 1.2 Kw mayor que la de salida (58.3 Kw Vs. 59.5 Kw). Así es como un drive de velocidad variable AC puede mejorar el FP y como la corriente de salida del drive puede ser mayor que la de entrada.
Comparación del FP entre los drives AC y DC.
La principal diferencia entre los drives estándar AC y DC es que las unidades de PWM de AC tiene un rectificador de diodos en la parte delantera mientras que las unidades de DC tienen un rectificador SCR. El principio de control del rectificador SCR se basa en el control de fase con la conmutación de línea, lo que provoca un desplazamiento de fase entre voltaje y corriente. Cuanto menor sea la velocidad, mayor es el cambios de fase. Esto reduce el PF de unidades de DC, especialmente en los rangos de velocidad más baja (Fig. 5)

Fig. # 5. Comparación del FP entre los drives AC y DC

Fig.# 1: Factor de Potencia de un motor de inducción estándar Vs la carga
El término factor de potencia se confunde a menudo con cos φ (phi). El FP se define como el cociente entre la potencia real o activa (P), expresada en kilovatios (KW), respecto a la potencia aparente (S), expresada en kilovolt-amp (KVA)

Recuerde que cos φ es igual al factor de potencia sólo cuando ambas, la tensión del sistema (U) y la corriente del sistema (I) son sinusoidales y con la misma frecuencia. En el mundo real de las instalaciones eléctricas, tanto las tensiones como las corrientes contienen armónicos, por lo que el factor de potencia no será igual a cos φ
En el circuito eléctrico mostrado en la figura. 2 la tensión de alimentación conectada al circuito se encuentra en una sola frecuencia. Esta tensión hace que la corriente fluya a través de los componentes.


Fig. # 3 Diagrama Fasorial
Estas tensiones y corriente se pueden expresar en forma de fasores (Fig. 3). La corriente es común para cada componente en el sistema, pero las tensiones tienen magnitudes diferentes, y están defasadas 90 ° . Los tres esquemas de la fig. 3 muestran los pasos para la definición de los fasores de voltaje y el ángulo entre el voltaje y la corriente total. Esto nos da la definición del cos φ:

Los beneficios del variador de velocidad de corriente alterna ( Drive AC)
Para producir el par de rotación y velocidad requerida, un motor de inducción requiere de ambas corrientes (activa y reactiva) de la red eléctrica. El par de giro del motor se crea como una interacción entre el componente de la corriente activa y el campo magnético. El campo es producido por el componente de la corriente reactiva. Las cargas ligeras toman menos corriente activa, pero el campo magnético, así como la corriente reactiva, se mantienen constante. Esto significa que el factor de potencia disminuye con la disminución de la carga. La corriente es principalmente activa a plena carga, pero principalmente reactiva con carga ligera.
Mediante la instalación de los accionamientos de velocidad variable AC, se pueden mejorar los controles del proceso, aumentar el ahorro de energía, y reducir el desgaste de la maquinaria. Estas unidades también tienen el beneficio añadido de mejorar el FP.
El FP en la línea de AC de un accionamiento con modulación por ancho de pulso (PWM) con un puente rectificador de entrada es próximo a la unidad (Fig. 4). La sección de rectificación consiste de un puente rectificador de diodos fijo el cual convierte el voltaje de la fuente de alimentación trifásico en un voltaje DC.
La bobina de choque L1 y el capacitor C, suavizan el voltaje DC convertido
El valor rectificado DC (Ud) es aproximadamente 1.35 veces el voltaje entre líneas (650 VDC aproximadamente para una fuente de 480 VAC).

En la sección de inversor el voltaje de DC (Ud) se convierte entonces en un voltaje AC de magnitud y frecuencia variables que se conecta al motor de corriente alterna. El inversor consiste de seis semiconductores muy rápidos, por lo general IGBT (insulated gate bipolar transistor) en unidades modernas. La unidad lógica de control (Control Logic) utiliza un microprocesador para switchear los IGBT encendiéndolos y apagándolos suministrando un voltaje y frecuencia variables al motor
Para comprender mejor el proceso por el cual los drives AC puede mejorar el FP, nos referimos al nivel de tensión y al sistema compuesto por el motor y el drive en la figura # 1.
Potencia mecánica del motor = 55 Kw (Potencia de salida del motor)
Voltaje de entrada = 400 V
Eficiencia = 94.4 %
FP = 0.89
La potencia eléctrica de entrada al motor sería = 55 Kw / 0.944 = 58.3 Kw
La potencia de salida del drive es igual a la potencia de entrada del motor, luego:
La potencia de salida del drive = 58.3 Kw
Voltaje de entrada del drive = 400 V
Eficiencia del drive = 98%
FP del drive = 0.96
La potencia de entrada del drive seria = 58.3 Kw / 0.98 = 59.5 Kw
La formula para determinar la potencia activa (real) en un sistema trifásico es:

Usando esta formula podemos calcular las corrientes de salida y entrada del drive.


La corriente de entrada al drive (alimentación) es aproximadamente un 5% menor que la corriente de salida hacia el motor.
La potencia activa de entrada al drive es 1.2 Kw mayor que la de salida (58.3 Kw Vs. 59.5 Kw). Así es como un drive de velocidad variable AC puede mejorar el FP y como la corriente de salida del drive puede ser mayor que la de entrada.
Comparación del FP entre los drives AC y DC.
La principal diferencia entre los drives estándar AC y DC es que las unidades de PWM de AC tiene un rectificador de diodos en la parte delantera mientras que las unidades de DC tienen un rectificador SCR. El principio de control del rectificador SCR se basa en el control de fase con la conmutación de línea, lo que provoca un desplazamiento de fase entre voltaje y corriente. Cuanto menor sea la velocidad, mayor es el cambios de fase. Esto reduce el PF de unidades de DC, especialmente en los rangos de velocidad más baja (Fig. 5)

Fig. # 5. Comparación del FP entre los drives AC y DC
martes, 27 de julio de 2010
Formas de Onda para tres tipos diferentes de Inversores
Inversores de voltaje variable (VVI, Variable Voltage Inverter)
Inversores de corriente (CSI, Current Source Inverter)
Inversores por modulación de ancho de pulso (PWM, Pulse Width Modulate Inverter)

Fig. # 1: Formas de onda de voltaje y corriente para tres tipos de inversores
La mayoría de los variadores de velocidad para motores AC , utilizan la tecnología PWM porque proporciona mejor calidad de corriente al motor AC, logrando que trabaje con mejor eficiencia y produciendo un control de torque más fino.

Inversores de corriente (CSI, Current Source Inverter)
Inversores por modulación de ancho de pulso (PWM, Pulse Width Modulate Inverter)

La mayoría de los variadores de velocidad para motores AC , utilizan la tecnología PWM porque proporciona mejor calidad de corriente al motor AC, logrando que trabaje con mejor eficiencia y produciendo un control de torque más fino.

Fig. # 2: Señal PWM de voltaje en el drive de un motor vista en un osciloscopio
lunes, 7 de junio de 2010

jueves, 4 de marzo de 2010

martes, 2 de marzo de 2010
TEORIA Y CONTROL DE MOTORES ELÉCTRICOS
CONTENIDO DEL CURSO
CAPITULO I: EL MAGNETISMO Y SUS PROPIEDADES
1.1.- Campo magnético producido por un imán de barra
1.2.- Campo magnético alrededor de un conductor
1.3.- Campo magnético de un solenoide
1.4.- Fuerza sobre un conductor por el que circula una corriente eléctrica
cuando se encuentra en un campo magnético
1.5.- Fuerza electromotriz (F.E.M) inducida en un conductor que se mueve en un campo magnético
CAPITULO II: MAQUINAS ELECTRICAS
2.1.- Necesidad del estudio de las máquinas eléctricas
2.2.- Introducción a las máquinas eléctricas
2.3.- Campo magnético giratorio
2.4.- Motor de inducción
A.- Principio de funcionamiento
B. - Tipos de motores
a.- Motor de jaula de ardilla
b.- Motor de doble jaula de ardilla
c.- Motor de rotor bobinado
C.-Métodos de arranque
a.- Arranque a pleno Voltaje
b.- Arranque a voltaje reducido
b1.- Arranque estrella - triángulo
b2.- Arranque can resistencias y reactancias
b3.- Arranque con autotransformador
D.- Comparación de los métodos de arranque
E.- Arranque del motor de inducción con rotor bobinado
2.5.- Motor sincrónico
A .- Principio de funcionamiento
B.- Arranque de los motores sincrónicos
C.- Arrancador automático para .motores sincrónicos
2.6.- Características de los motores trifásicos
1.- Voltajes nominales
2. - Frecuencia
3.- Intensidades nominales:
Intensidad de plena carga
Intensidad de arranque
Intensidad de vació
4.- Letra de código
5. - Intensidad nominal de placa
6.- Par motor (torque):
Par de arranque
Par mínimo de aceleración
Par máximo
Par de plena carga
7.- Aislamientos
8.- Factor de servicio
9. - Frame
10.- Cubiertas
11. - Conexiones
12.- Circuitos ramales del motor
13.- Corto circuito y sobre carga
14.- Elementos de desconexión manual
2.7.- Interruptores
2.8.- Arrancadores
2.9.- Cálculo de los componentes del circuito ramal de un motor
Para más información: jfbingenieria@gmail.com
CAPITULO I: EL MAGNETISMO Y SUS PROPIEDADES
1.1.- Campo magnético producido por un imán de barra
1.2.- Campo magnético alrededor de un conductor
1.3.- Campo magnético de un solenoide
1.4.- Fuerza sobre un conductor por el que circula una corriente eléctrica
cuando se encuentra en un campo magnético
1.5.- Fuerza electromotriz (F.E.M) inducida en un conductor que se mueve en un campo magnético
CAPITULO II: MAQUINAS ELECTRICAS
2.1.- Necesidad del estudio de las máquinas eléctricas
2.2.- Introducción a las máquinas eléctricas
2.3.- Campo magnético giratorio
2.4.- Motor de inducción
A.- Principio de funcionamiento
B. - Tipos de motores
a.- Motor de jaula de ardilla
b.- Motor de doble jaula de ardilla
c.- Motor de rotor bobinado
C.-Métodos de arranque
a.- Arranque a pleno Voltaje
b.- Arranque a voltaje reducido
b1.- Arranque estrella - triángulo
b2.- Arranque can resistencias y reactancias
b3.- Arranque con autotransformador
D.- Comparación de los métodos de arranque
E.- Arranque del motor de inducción con rotor bobinado
2.5.- Motor sincrónico
A .- Principio de funcionamiento
B.- Arranque de los motores sincrónicos
C.- Arrancador automático para .motores sincrónicos
2.6.- Características de los motores trifásicos
1.- Voltajes nominales
2. - Frecuencia
3.- Intensidades nominales:
Intensidad de plena carga
Intensidad de arranque
Intensidad de vació
4.- Letra de código
5. - Intensidad nominal de placa
6.- Par motor (torque):
Par de arranque
Par mínimo de aceleración
Par máximo
Par de plena carga
7.- Aislamientos
8.- Factor de servicio
9. - Frame
10.- Cubiertas
11. - Conexiones
12.- Circuitos ramales del motor
13.- Corto circuito y sobre carga
14.- Elementos de desconexión manual
2.7.- Interruptores
2.8.- Arrancadores
2.9.- Cálculo de los componentes del circuito ramal de un motor
Para más información: jfbingenieria@gmail.com
ACCIONAMIENTOS ELECTRICOS (DRIVES)
CONTENIDO DEL CURSO
1.- Fundamentos de los accionamientos eléctricos
2.- Curvas típicas de Torque – Velocidad
3.- Forma de la curva torque-velocidad
4.- Curvas Corriente – velocidad
5.- Frenado Regenerativo
Para más información: jfbingenieria@gmail.com
1.- Fundamentos de los accionamientos eléctricos
2.- Curvas típicas de Torque – Velocidad
3.- Forma de la curva torque-velocidad
4.- Curvas Corriente – velocidad
5.- Frenado Regenerativo
Para más información: jfbingenieria@gmail.com
viernes, 19 de febrero de 2010
GENERACION ELECTRICA
(Curso diseñado para operadores de Casa de Fuerza)
CONTENIDO
CAPITULO I: CORRIENTE ALTERNA
1.1 Forma de Onda de C.A. y C.C.
1.2 Representación de corrientes y tensiones alternas
1.3 Valores de una onda de tensión o corriente alterna
1.3.1 Valor medio
1.3.2 Valor eficaz
1.4 Notación fasorial
1.5 Circuitos de corriente alterna (C.A)
1.5.1 Circuito resistivo puro
1.5.2 Circuito capacitivo puro
1.5.3 Circuito inductivo puro
1.6 Diferencia de fase
1.7 Factor de Potencia
1.7.1 Fundamentos
1.7.2 Que es el factor de potencia
1.7.3 Factores que influyen en un bajo f.p
1.7.4 Desventajas 28 1.7.5 Como se mejora
CAPITULO II : EL MAGNETISMO Y SUS PROPIEDADES
2.1 Campo magnético producido por un imán de barra
2.2 Campo magnético alrededor de un conductor
2.3 Campo magnético de un solenoide
2.4 Campo magnético originado por una C.A
2.5 Fuerza Electromotriz (F.E.M.) inducida en un conductor que se mueve en un campo magnético
2.6 Campo magnético giratorio
CAPITULO III : EL GENERADOR DE CORRIENTE ALTERNA
3.1 Componentes de un generador trifásico
3.2 Principio de funcionamiento
3.3 Estudio elemental de un generador sincrónico en régimen transitorio
3.4 Regulación manual de la tensión
3.5 Principio de funcionamiento de un regulador de tensión
3.6 Conceptos generales sobre la excitación de los generadores
3.7 Velocidad de respuesta de las excitatrices para generadores sincrónicos
3.8 Características de funcionamiento de las excitatrices para generadores sincrónicos
3.9 Sistemas modernos de excitación de los generadores sincrónicos
3.10 Regulación de voltaje y velocidad
3.11 El generador sincrónico bajo carga
CAPITULO IV ; ACOPLAMIENTO EN PARALELO DE GENERADORES SINCRONICOS
4.1 Condiciones para el acoplamiento en paralelo
de generadores trifásicos sincrónicos
4.2 Sincronización de generadores trifásicos
4.3 El generador sincrónico acoplado a una barra infinita
4.3.1 Efecto de variar la corriente de excitación
4.3.2 Efecto de variar el torque mecánico de la turbina
4.4 Interpretación física del comportamiento del generador
4.5 Potencia activa entregada por el generador
4.6 Reparto de carga entre alternadores en paralelo
4.7 Factor de potencia de generadores en paralelo
Para más información: jfbingenieria@gmail.com
CONTENIDO
CAPITULO I: CORRIENTE ALTERNA
1.1 Forma de Onda de C.A. y C.C.
1.2 Representación de corrientes y tensiones alternas
1.3 Valores de una onda de tensión o corriente alterna
1.3.1 Valor medio
1.3.2 Valor eficaz
1.4 Notación fasorial
1.5 Circuitos de corriente alterna (C.A)
1.5.1 Circuito resistivo puro
1.5.2 Circuito capacitivo puro
1.5.3 Circuito inductivo puro
1.6 Diferencia de fase
1.7 Factor de Potencia
1.7.1 Fundamentos
1.7.2 Que es el factor de potencia
1.7.3 Factores que influyen en un bajo f.p
1.7.4 Desventajas 28 1.7.5 Como se mejora
CAPITULO II : EL MAGNETISMO Y SUS PROPIEDADES
2.1 Campo magnético producido por un imán de barra
2.2 Campo magnético alrededor de un conductor
2.3 Campo magnético de un solenoide
2.4 Campo magnético originado por una C.A
2.5 Fuerza Electromotriz (F.E.M.) inducida en un conductor que se mueve en un campo magnético
2.6 Campo magnético giratorio
CAPITULO III : EL GENERADOR DE CORRIENTE ALTERNA
3.1 Componentes de un generador trifásico
3.2 Principio de funcionamiento
3.3 Estudio elemental de un generador sincrónico en régimen transitorio
3.4 Regulación manual de la tensión
3.5 Principio de funcionamiento de un regulador de tensión
3.6 Conceptos generales sobre la excitación de los generadores
3.7 Velocidad de respuesta de las excitatrices para generadores sincrónicos
3.8 Características de funcionamiento de las excitatrices para generadores sincrónicos
3.9 Sistemas modernos de excitación de los generadores sincrónicos
3.10 Regulación de voltaje y velocidad
3.11 El generador sincrónico bajo carga
CAPITULO IV ; ACOPLAMIENTO EN PARALELO DE GENERADORES SINCRONICOS
4.1 Condiciones para el acoplamiento en paralelo
de generadores trifásicos sincrónicos
4.2 Sincronización de generadores trifásicos
4.3 El generador sincrónico acoplado a una barra infinita
4.3.1 Efecto de variar la corriente de excitación
4.3.2 Efecto de variar el torque mecánico de la turbina
4.4 Interpretación física del comportamiento del generador
4.5 Potencia activa entregada por el generador
4.6 Reparto de carga entre alternadores en paralelo
4.7 Factor de potencia de generadores en paralelo
Para más información: jfbingenieria@gmail.com
lunes, 15 de febrero de 2010

REPARTO DE CARGA ENTRE GENERADORES EN PARALELO
La transferencia de la carga entre dos generadores, se hace a través del gobernador de velocidad del motor primario.
La máquina que absorbe más carga ajusta su gobernador de manera tal que el motor primario admite más energía. La máquina que pierde carga ajusta su gobernador de manera tal que el motor primario pierde energía.
El reparto de KW entre generadores AC operando en paralelo, depende de la característica carga-velocidad (carga-frecuencia) del gobernador de velocidad de la máquina motriz. Es independiente de las caracteristicas del gobernador. La figura 4.9 ilustra la característica típica de una máquina motriz manejada por un gobernador mecánico. Note como la velocidad y frecuencia
disminuyen cuando aumenta la carga. Como este tipo de gobernador es de acción lenta, una caída de la velocidad de 1 a 3% es esencial para una operación estable; si dos generadores están en paralelo y ambas características son horizontales (cero caída de velocidad), una máquina tenderá a absorber la carga y manejar a la otra como motor.
Sin embargo, la rápida respuesta de los gobernadores electrónicos permiten a las máquinas por ellos gobernadas, operar en paralelo sin caída de velocidad.
Un gobernador con 3% de caída de velocidad causa una diferencia en la velocidad y frecuencia del 3% entre vacio y plena carga. Así, si un turbogenerador con una pendiente del 3% operando a 1200 KW y 60 Hertz, cuando se quita la carga (funcionamiento en vacío), la frecuencia aumentará un 3% es decir:
60 + (0,03) . 6 = 61,18 Herzt
En la fig. 4.9 se representa la curva característica carga-velocidad para una pendiente de 3%. La intersección de la curva con el eje vertical (velocidad o frecuencia) representa la frecuencia del alternador sin carga para un ajuste dado del gobernador. Girando la palanca de control de velocidad del gobernador hacia uno u otro lado, aumentará o bajará el ajuste del gobernador respectivamente, pero esto no cambia la pendiente (caída) de la curva. Lo dicho anteriormente, se muestra por las líneas a trazos en la fig. 4.9.

FIG.4.9: CARACTERISTICAS DE REGULACION DE DOS ALTERNADORES OPERANDO EN PARALELO
Para un ajuste de velocidad en vacío dado, hay una relación fija entre la frecuencia y la carga en KW. Ajustando la velocidad en vacío a 61,8 Herzt (fig. 4.9), una carga de 600 KW ocasionará
que la frecuencia caiga a 60 Hertz.
En algunas aplicaciones es deseable operar las máquinas con ajustes de pendientes distintas en sus gobernadores, por ejemplo: si una máquina se ajusta para cero pendiente y las otras en paralelo con ellas, con una pendiente del 2 ó 3%. Las máquinas con pendiente podrán cargarse para operar a óptima eficiencia. La máquina con pendiente puede manejar una carga fija para una frecuencia específica. Ya que todas las fluctuaciones de la carga en la barra serán absorbidas por la máquina cuyo gobernador ha sido ajustado a cero pendiente, ella absorberá toda la carga adicional de la barra, de la misma manera perderá carga si disminuye la carga de la barra e incluso se saldrá de la barra si la carga en la máquina llega a cero. La carga puede transferirse ajustando solamente el gobernador de la máquina con pendiente.
Consideremos un sistema elemental formado por dos generadores trifásicos G1 y G2 con sus dos motores primarios M1 y M2 suministrando potencia a una carga L tal como se representa en la fig. 4.10.

FIG.4.10: OPERACION EN PARALELO DE DOS GENERADORES SINCRONICOS
Supongamos que el generador G1 está alimentando a la carga L a la tensión y frecuencia nominales estando desconectado el generador G2. El generador G2 podrá acoplarse en paralelo con el G1 llevándolo a la velocidad de sincronismo y ajustando el reostato de excitación hasta igualar su tensión con la de las barras. Si la frecuencia de la máquina se pretende acoplar no es exactamente igual a la de las barras, la diferencia vectorial entre su tensión y la existente en las barras irá variando a una frecuencia igual a la diferencia de frecuencias de ambas tensiones, diferencia que puede ser de una fracción de ciclo por segundo. El interruptor S2 deberá cerrarse en el instante en que ambas tensiones están momentáneamente en fase, momento en el que la tensión entre bornes
del interruptor es igual a cero. Para determinar el momento oportuno de cerrar el interruptor se utiliza un dispositivo denominado sincronoscopio. Una vez sincronizado G2 en la forma indicada se puede distribuir la carga tanto activa como reactiva entre las dos máquinas actuando adecuadamente sobre los reguladores de los motores primarios y sobre los reóstatos de excitación.
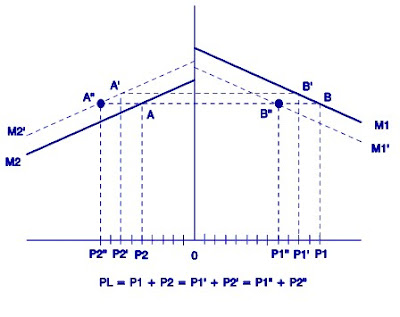
A diferencia de los generadores de corriente contínua (DC), los generadores sincrónicos acoplados en paralelo deben girar exactamente a la misma velocidad (si tienen el mismo número de polos), y en consecuencia, la distribución de la potencia activa entre ambas máquinas depende exclusivamente, casi siempre, de la característica velocidad-potencia de sus respectivos motores primarios. Las rectas inclinadas de trazo contínuo M1 y M2 de la fig.4.11(a) representan la característica velocidad-potencia de dichos motores con abertura constante de sus reguladores: todos los motores primarios tienen su características velocidad-potencia descendente. La carga total PL está representada por la recta horizontal AB y las potencias de salida de los generadores por P1 y P2. Supongamos que se abre más el regulador de M2 trasladándose hacia arriba la característica hasta M2, la carga será ahora la línea de trazos A' B'. Obsérvese que la potencia de salida del generador 2 se ha elevado desde P2 hasta P2' mientras que la del generador 1 ha

(a)
 (b)
(b)
FIG.4.11: CARACTERISTICAS VELOCIDAD-POTENCIA
DE LOS MOTORES PRIMARIOS
descendido desde P1 hasta P1' y que ha aumentado la frecuencia del sistema: esta frecuencia puede restituirse a su valor normal transfiriendo carga del generador 1 al generador 2 cerrando parcialmente el regulador del motor M1 de forma que su característica pase a ocupar la posición de la línea de trazos M1'de la fig.4.11 (b). La carga total estará ahora representada por A" B" y las potencias de salida de los generadores por P1" y P2" respectivamente.
Como puede apreciarse, la frecuencia del sistema y el reparto de carga activa entre los dos generadores puede ajustarse maniobrando sobre los reguladores de los motores primarios.
La variación de las excitaciones influye sobre la tensión en bornes y sobre la distribución de los KVA reactivos.
La máquina que absorbe más carga ajusta su gobernador de manera tal que el motor primario admite más energía. La máquina que pierde carga ajusta su gobernador de manera tal que el motor primario pierde energía.
El reparto de KW entre generadores AC operando en paralelo, depende de la característica carga-velocidad (carga-frecuencia) del gobernador de velocidad de la máquina motriz. Es independiente de las caracteristicas del gobernador. La figura 4.9 ilustra la característica típica de una máquina motriz manejada por un gobernador mecánico. Note como la velocidad y frecuencia
disminuyen cuando aumenta la carga. Como este tipo de gobernador es de acción lenta, una caída de la velocidad de 1 a 3% es esencial para una operación estable; si dos generadores están en paralelo y ambas características son horizontales (cero caída de velocidad), una máquina tenderá a absorber la carga y manejar a la otra como motor.
Sin embargo, la rápida respuesta de los gobernadores electrónicos permiten a las máquinas por ellos gobernadas, operar en paralelo sin caída de velocidad.
Un gobernador con 3% de caída de velocidad causa una diferencia en la velocidad y frecuencia del 3% entre vacio y plena carga. Así, si un turbogenerador con una pendiente del 3% operando a 1200 KW y 60 Hertz, cuando se quita la carga (funcionamiento en vacío), la frecuencia aumentará un 3% es decir:
60 + (0,03) . 6 = 61,18 Herzt
En la fig. 4.9 se representa la curva característica carga-velocidad para una pendiente de 3%. La intersección de la curva con el eje vertical (velocidad o frecuencia) representa la frecuencia del alternador sin carga para un ajuste dado del gobernador. Girando la palanca de control de velocidad del gobernador hacia uno u otro lado, aumentará o bajará el ajuste del gobernador respectivamente, pero esto no cambia la pendiente (caída) de la curva. Lo dicho anteriormente, se muestra por las líneas a trazos en la fig. 4.9.

FIG.4.9: CARACTERISTICAS DE REGULACION DE DOS ALTERNADORES OPERANDO EN PARALELO
Para un ajuste de velocidad en vacío dado, hay una relación fija entre la frecuencia y la carga en KW. Ajustando la velocidad en vacío a 61,8 Herzt (fig. 4.9), una carga de 600 KW ocasionará
que la frecuencia caiga a 60 Hertz.
En algunas aplicaciones es deseable operar las máquinas con ajustes de pendientes distintas en sus gobernadores, por ejemplo: si una máquina se ajusta para cero pendiente y las otras en paralelo con ellas, con una pendiente del 2 ó 3%. Las máquinas con pendiente podrán cargarse para operar a óptima eficiencia. La máquina con pendiente puede manejar una carga fija para una frecuencia específica. Ya que todas las fluctuaciones de la carga en la barra serán absorbidas por la máquina cuyo gobernador ha sido ajustado a cero pendiente, ella absorberá toda la carga adicional de la barra, de la misma manera perderá carga si disminuye la carga de la barra e incluso se saldrá de la barra si la carga en la máquina llega a cero. La carga puede transferirse ajustando solamente el gobernador de la máquina con pendiente.
Consideremos un sistema elemental formado por dos generadores trifásicos G1 y G2 con sus dos motores primarios M1 y M2 suministrando potencia a una carga L tal como se representa en la fig. 4.10.

FIG.4.10: OPERACION EN PARALELO DE DOS GENERADORES SINCRONICOS
Supongamos que el generador G1 está alimentando a la carga L a la tensión y frecuencia nominales estando desconectado el generador G2. El generador G2 podrá acoplarse en paralelo con el G1 llevándolo a la velocidad de sincronismo y ajustando el reostato de excitación hasta igualar su tensión con la de las barras. Si la frecuencia de la máquina se pretende acoplar no es exactamente igual a la de las barras, la diferencia vectorial entre su tensión y la existente en las barras irá variando a una frecuencia igual a la diferencia de frecuencias de ambas tensiones, diferencia que puede ser de una fracción de ciclo por segundo. El interruptor S2 deberá cerrarse en el instante en que ambas tensiones están momentáneamente en fase, momento en el que la tensión entre bornes
del interruptor es igual a cero. Para determinar el momento oportuno de cerrar el interruptor se utiliza un dispositivo denominado sincronoscopio. Una vez sincronizado G2 en la forma indicada se puede distribuir la carga tanto activa como reactiva entre las dos máquinas actuando adecuadamente sobre los reguladores de los motores primarios y sobre los reóstatos de excitación.
A diferencia de los generadores de corriente contínua (DC), los generadores sincrónicos acoplados en paralelo deben girar exactamente a la misma velocidad (si tienen el mismo número de polos), y en consecuencia, la distribución de la potencia activa entre ambas máquinas depende exclusivamente, casi siempre, de la característica velocidad-potencia de sus respectivos motores primarios. Las rectas inclinadas de trazo contínuo M1 y M2 de la fig.4.11(a) representan la característica velocidad-potencia de dichos motores con abertura constante de sus reguladores: todos los motores primarios tienen su características velocidad-potencia descendente. La carga total PL está representada por la recta horizontal AB y las potencias de salida de los generadores por P1 y P2. Supongamos que se abre más el regulador de M2 trasladándose hacia arriba la característica hasta M2, la carga será ahora la línea de trazos A' B'. Obsérvese que la potencia de salida del generador 2 se ha elevado desde P2 hasta P2' mientras que la del generador 1 ha


FIG.4.11: CARACTERISTICAS VELOCIDAD-POTENCIA
DE LOS MOTORES PRIMARIOS
descendido desde P1 hasta P1' y que ha aumentado la frecuencia del sistema: esta frecuencia puede restituirse a su valor normal transfiriendo carga del generador 1 al generador 2 cerrando parcialmente el regulador del motor M1 de forma que su característica pase a ocupar la posición de la línea de trazos M1'de la fig.4.11 (b). La carga total estará ahora representada por A" B" y las potencias de salida de los generadores por P1" y P2" respectivamente.
Como puede apreciarse, la frecuencia del sistema y el reparto de carga activa entre los dos generadores puede ajustarse maniobrando sobre los reguladores de los motores primarios.
La variación de las excitaciones influye sobre la tensión en bornes y sobre la distribución de los KVA reactivos.
FACTOR DE POTENCIA DE GENERADORES EN PARALELO
Generadores individuales suministrando potencia a un sistema de distribución tienen el mismo factor de potencia de la carga. Sin embargo, cuando operan en paralelo, los generadores pueden tener diferentes factores de potencia.
Cuando los generadores están operando en paralelo, sus voltajes terminales son los mismos. Cuando un generador absorbe carga su voltaje interno disminuye por debajo del voltaje de la barra, se dice que la máquina está subexcitada para esta carga en particular. La máquina que cede la carga aumenta su voltaje interno por encima del voltaje de la barra, y se dice que está sobreexcitada para esa carga en particular.
Si la carga en la barra tiene un factor de potencia atrasado, el cual es el caso general, la diferencia del voltaje interno ocasionado por una transferencia de carga forzará a la máquina que absorvió carga a tomar una proporción menor a los kvar que le corresponden. Así, la máquina que aceptó carga tiene un factor de potencia menos atrasado que la barra y aún puede llegar a estar adelantado, mientras que la máquina que perdió carga tiene un factor de potencia más atrasado que la barra. Aunque la potencia activa puede dividirse por igual entre las máquinas, la división igual de la potencia reactiva requiere ajuste del voltaje interno de cada máquina. Para hacer esto, debe incrementar la excitación de la máquina que tomó carga y disminuir la de la otra máquina, hasta que el medidor de factor de potencia de cada generador sea el mismo factor de potencia en atraso. La excitación de cada máquina se ajusta con su respectivo reóstato de campo.
Si el panel de los generadores no está equipado con un medidor de factor de potencia o medidor de kvar. (potencia reactiva), el balance de la potencia reactiva puede hacerse observando los amperímetros de C.A. respectivos. La excitación de la máquina que tomó carga debe aumentarse y la de la otra máquina disminuirse, hasta que los amperímetros A.C. de ambas máquinas indiquen el mismo valor. Si se lleva demasiado lejos resultará en un desbalance en la dirección opuesta.
Las máquinas equipadas con reguladores de voltaje automáticos no requieren ajuste manual de sus reostatos para balancear las kvar. Un dispositivo de compesación en el regulador automáticamente ajusta la distribución de la kvar y por lo tanto el factor de potencia de cada máquina. Si los factores de potencia no son iguales, puede ajustarse la perilla de control del regulador de voltaje para igualarlo.
El rendimiento de los generadores en paralelo es maximo cuando los factores de potencia son iguales
Cuando los generadores están operando en paralelo, sus voltajes terminales son los mismos. Cuando un generador absorbe carga su voltaje interno disminuye por debajo del voltaje de la barra, se dice que la máquina está subexcitada para esta carga en particular. La máquina que cede la carga aumenta su voltaje interno por encima del voltaje de la barra, y se dice que está sobreexcitada para esa carga en particular.
Si la carga en la barra tiene un factor de potencia atrasado, el cual es el caso general, la diferencia del voltaje interno ocasionado por una transferencia de carga forzará a la máquina que absorvió carga a tomar una proporción menor a los kvar que le corresponden. Así, la máquina que aceptó carga tiene un factor de potencia menos atrasado que la barra y aún puede llegar a estar adelantado, mientras que la máquina que perdió carga tiene un factor de potencia más atrasado que la barra. Aunque la potencia activa puede dividirse por igual entre las máquinas, la división igual de la potencia reactiva requiere ajuste del voltaje interno de cada máquina. Para hacer esto, debe incrementar la excitación de la máquina que tomó carga y disminuir la de la otra máquina, hasta que el medidor de factor de potencia de cada generador sea el mismo factor de potencia en atraso. La excitación de cada máquina se ajusta con su respectivo reóstato de campo.
Si el panel de los generadores no está equipado con un medidor de factor de potencia o medidor de kvar. (potencia reactiva), el balance de la potencia reactiva puede hacerse observando los amperímetros de C.A. respectivos. La excitación de la máquina que tomó carga debe aumentarse y la de la otra máquina disminuirse, hasta que los amperímetros A.C. de ambas máquinas indiquen el mismo valor. Si se lleva demasiado lejos resultará en un desbalance en la dirección opuesta.
Las máquinas equipadas con reguladores de voltaje automáticos no requieren ajuste manual de sus reostatos para balancear las kvar. Un dispositivo de compesación en el regulador automáticamente ajusta la distribución de la kvar y por lo tanto el factor de potencia de cada máquina. Si los factores de potencia no son iguales, puede ajustarse la perilla de control del regulador de voltaje para igualarlo.
El rendimiento de los generadores en paralelo es maximo cuando los factores de potencia son iguales
Suscribirse a:
Comentarios (Atom)